Agile electrical & computer engineer with a passion for propelling the advent of cutting-edge technology. Applied experience ranging from embedded and consumer-facing software development to electrical hardware design.
Chicago, IL — October 2018 - Present
getguardian.com my.guardian.property
2022 - Present
Responsible for a wide range of engineering projects across the company's hardware and software products.
2020 - 2022
2018 - 2020
Austin, TX — August 2017 - December 2017 (Consulting), January 2018 - August 2018
Louisville, KY — Summer 2015, Spring 2016, Fall 2016


University of Louisville — January 2017 - December 2017
Achieved 2nd place at the North American venue IARC in 2017

University of Louisville — September 2016 - May 2017
Achieved overall 1st place in the 2017 NASA Student Launch Initiative (nasa.gov )
University of Louisville — Fall 2017

J.B. Speed School of Engineering, University of Louisville
Graduated December 2017
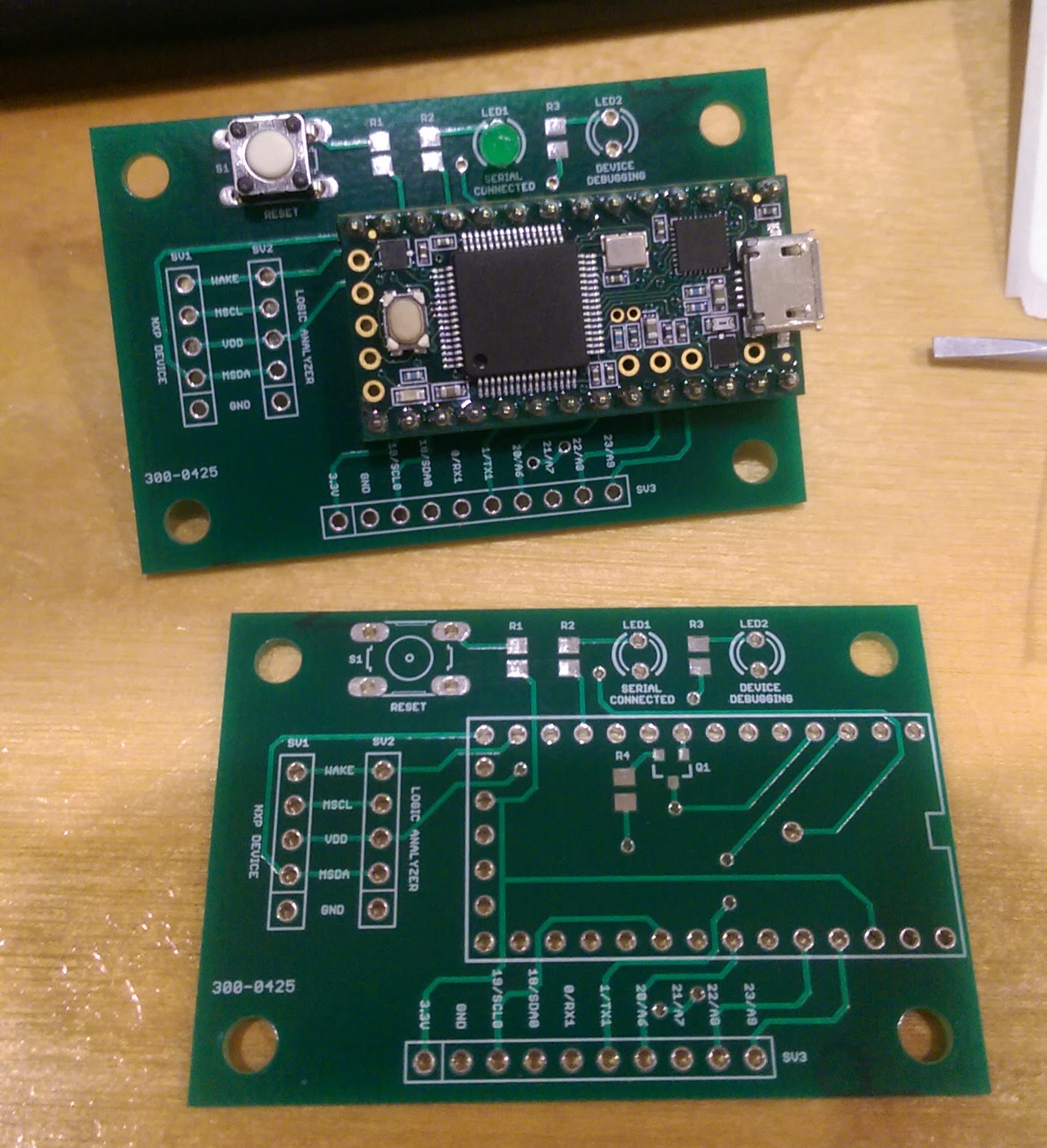
iKeyless Debugger
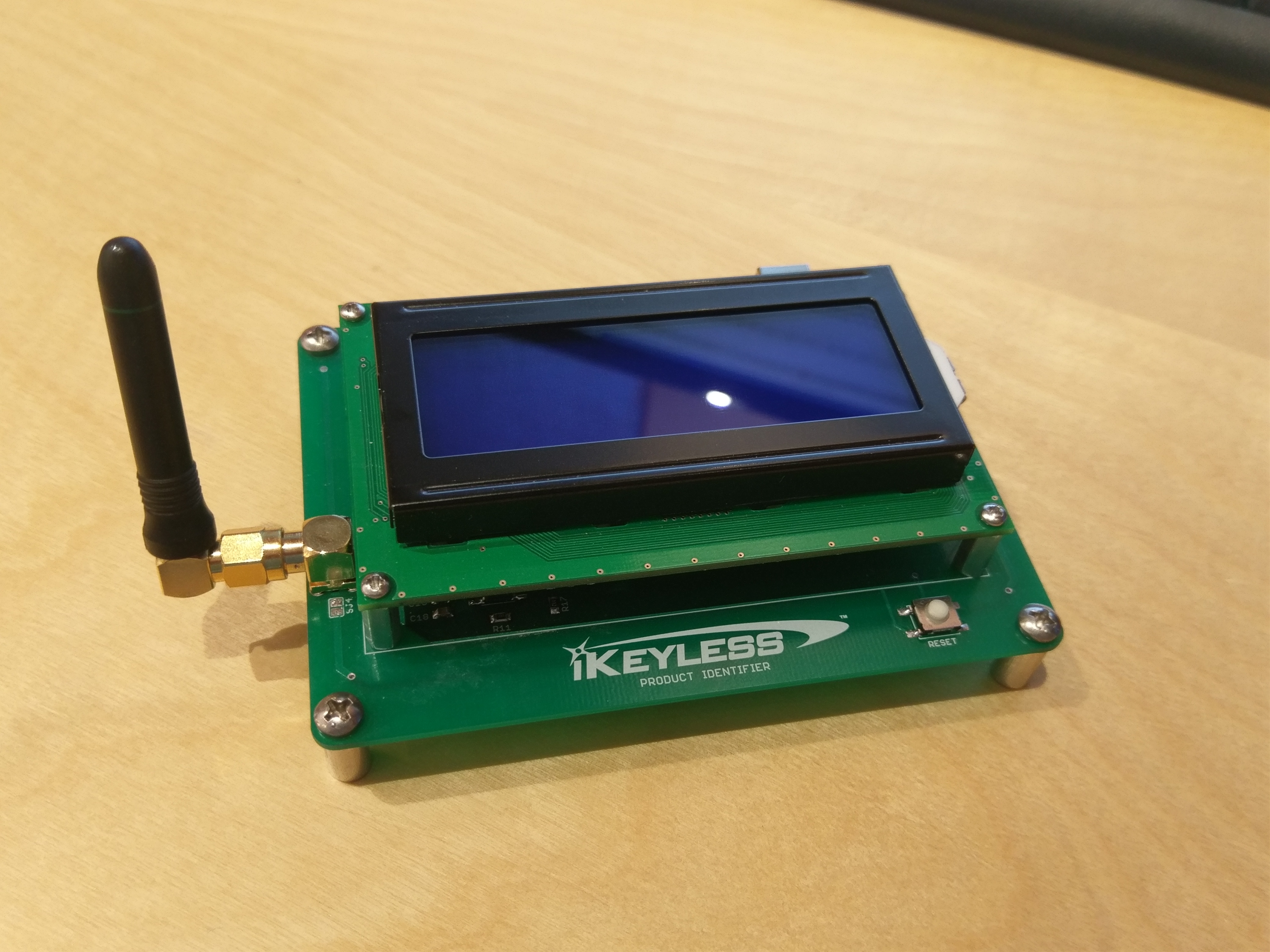
iKeyless Product ID 1

iKeyless Product ID 2

iKeyless Product ID 3

iKeyless Product ID 4

iKeyless Product ID 5
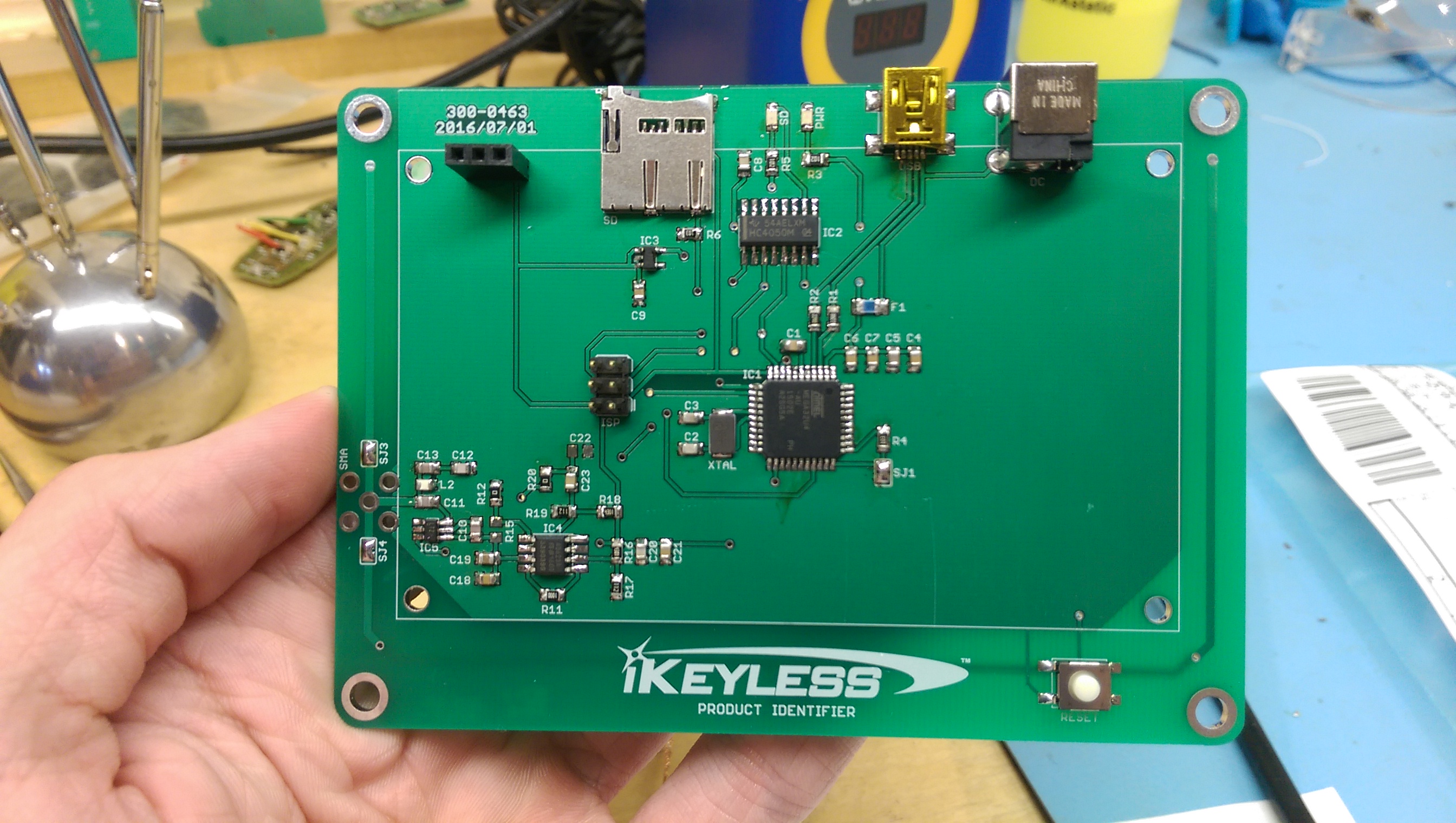
iKeyless Product ID 6
iKeyless Talos 1

iKeyless Talos 2
iKeyless Talos 3

iKeyless Talos 4
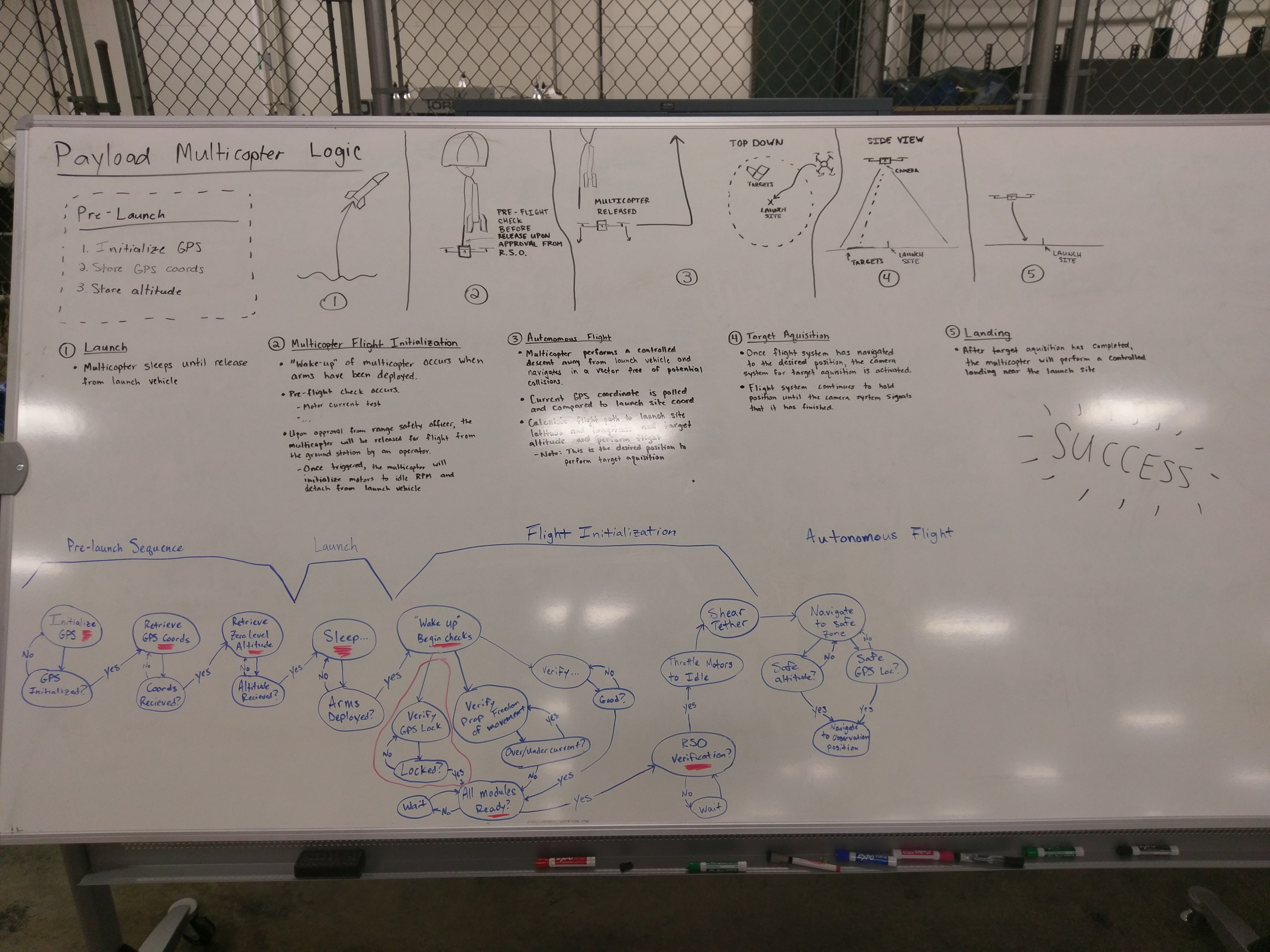
RCR Payload 1
RCR Recovery 1

RCR Tragedy 1

RR Competition 1
RR Competition 2

RR Competition 3

RR Competition 4

RR Competition 5

RR Competition 6

RR Prototype 1

Skyways Field Ops 1
